← projects
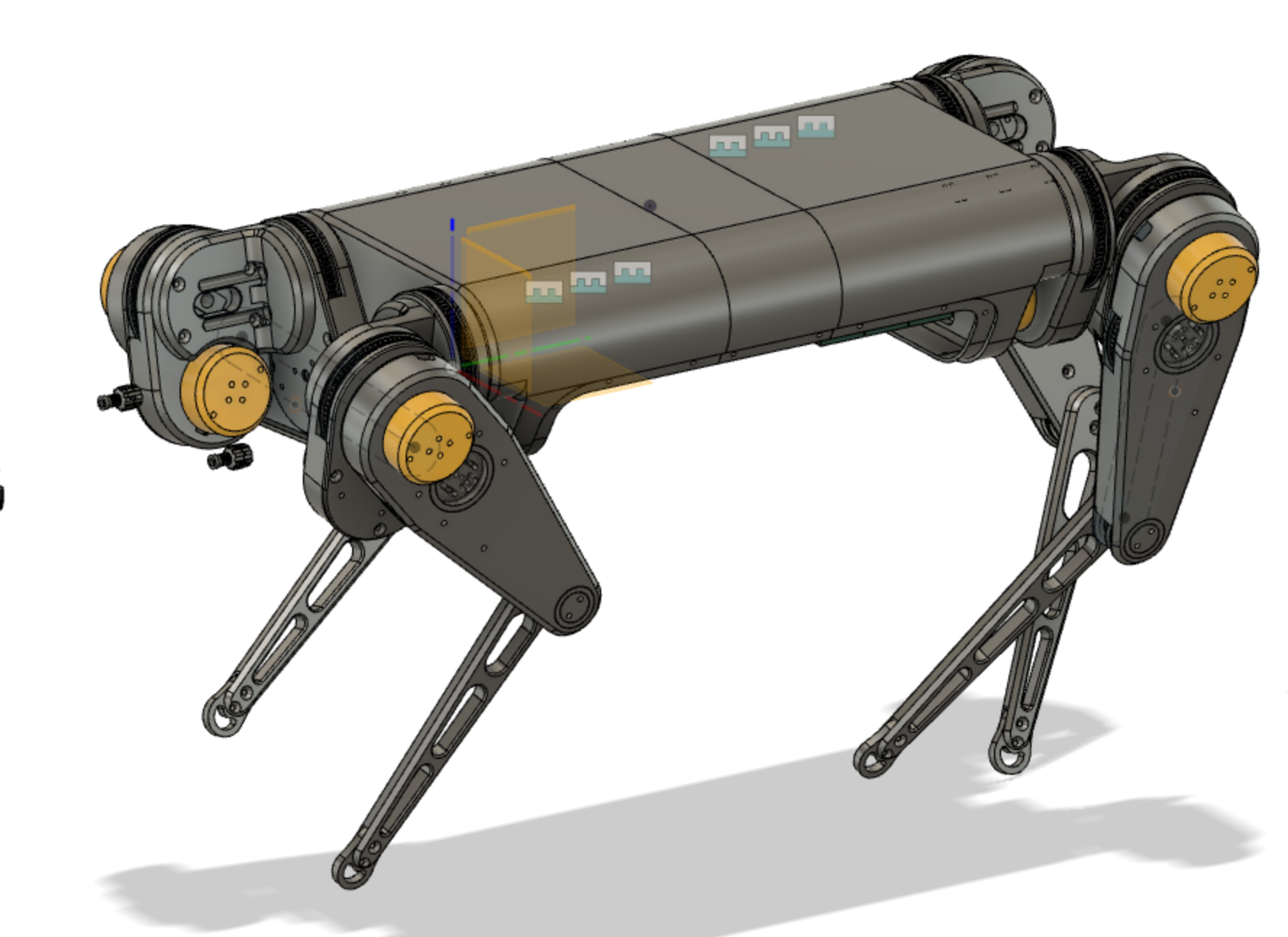
Mammalian Quadruped
12 degree-of-freedom quadruped robot capable of emulating canine gait, developed as an independent project.
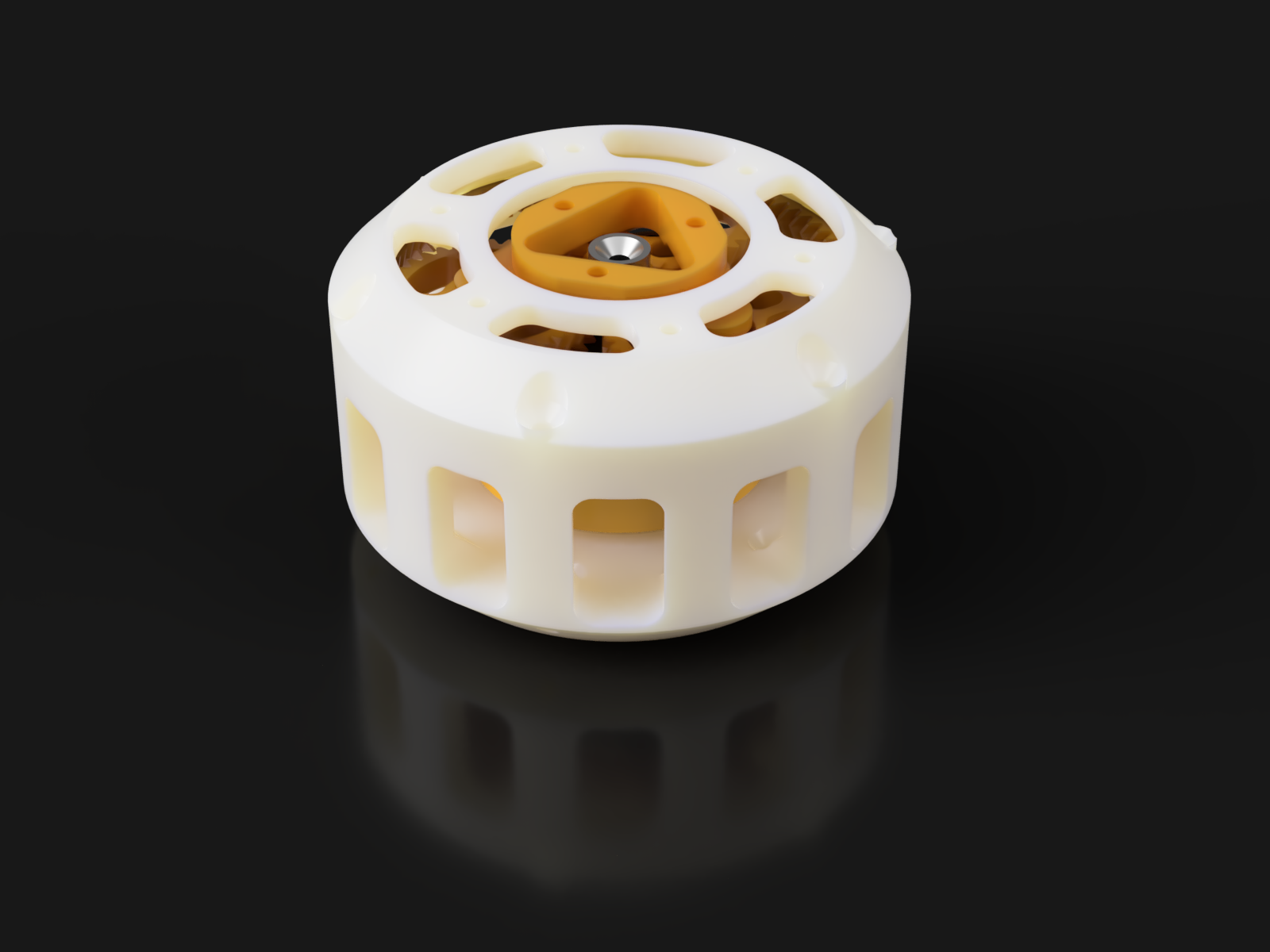
The robot is entirely custom designed and 3D printed to provide a lightweight, inexpensive, and easily modified frame. Low frequency speed controllers and high torque brushless motors provide a near instantaneous force response, allowing for complex reactive control algorithms. A control AI was trained to emulate motion capture data from canine and feline gaits in simulated physics environments. An original meta-learning approach was employed to speed training.